看不清摸不著还能识别出物体,目标算法让机器人更聪明
研究人员开发出新算法,使机器人无需多角度取景,就可以迅速识别出三维空间里的物体。
目前机器人识别三维空间里的物体都是通过多个角度观察来收集信息,从而做出判断,故而常出现反应速度慢和对存储和计算资源的需求量大等问题。对此,研究人员开发出一套新的计算机视觉算法,即使在部分物体被遮挡的条件下,它也能够使机器人直接识别出物体,无需多角度收集信息。
类似传统的用于训练机器人的计算机视觉算法,该算法也需要通过四千个分布在十个不同类别的物体数据的训练,以此来了解这个世界。
当我们需要机器人识别物体时,传统的算法只是用来训练如何识别物体的特征和物体叠加的总体特征,而此处新的算法会计算对象的相似度和物体之间不同之处这两项因素。
具体来看,就是当它需要识别锅和罐头的时候,算法不会花时间检测中空部分,而是寻找其他因素;而当算法确定物体是个锅的时候,它会将重点放在锅的深度或手柄的位置,以确定锅的类型。
对此,Ben Burchfiel博士说:“这样可以释放储存和计算资源,让学习变得更容易。”
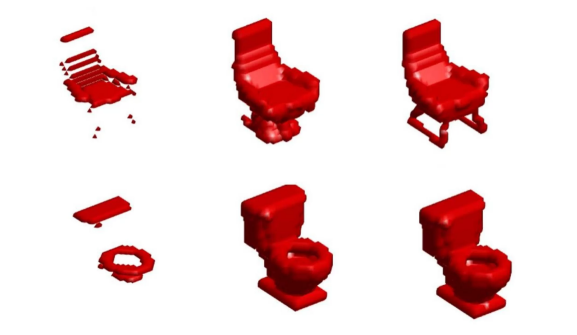
不过在识别任务中,很多时候物体都是被遮掩的。虽然传统的深度学习算法能够解析复杂的输入数据,并输出一个简单的预测结果,但是当对象模糊时,传统的算法往往无法给出准确的结果,正确率极低。而这里的新算法可以通过关联的形状特征来构建整个对象。
根据训练结果,嵌入该算法的机器人大约只需花一秒来预测结果,正确率目前可达到75%,而且它无需从不同角度获取物体信息,就可以推断出物体不可见的部分。
Burchfiel表示,目前需要做的就是用大量的数据对这一算法进行训练,以达到更高的准确度和实现对算法的优化。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker 长按识别二维码关注
长按识别二维码关注硬科技产业媒体
关注技术驱动创新
 机器人深度学习
机器人深度学习