Google无人驾驶知多少?
给你一辆无人驾驶汽车,敢坐吗?
无人驾驶汽车即自动驾驶汽车,其实就是一个可以自动轮式移动的机器人。它打破了传统的“人——车——路”的闭路系统,解放了驾驶人员,大大提高了汽车的安全性能和驾驶效率,是未来汽车制造业和智能科技相结合的高科技产业。
其中做得最好的无疑是Google公司,他们旗下所研究的无人驾驶汽车已经完成了160多公里的测试,且没有发生任何严重的碰撞交通事故。因此在无人驾驶行业里遥遥领先,目前还没有几家公司所研发出来的技术可以和Google相媲美。无疑,无人机驾驶汽车当中蕴含了无数高门槛的黑科技成分,下面我们就来了解一下到底有些什么:
一、传感器探知环境
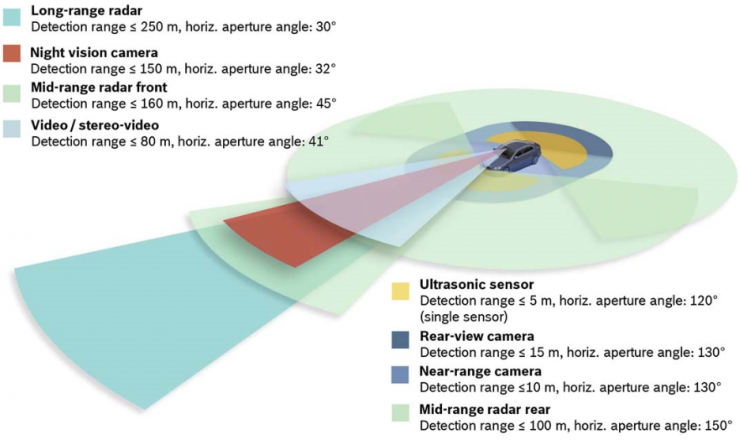
无人驾驶汽车如何来感知环境的变化?无人驾驶汽车说白了其实也是一种机器人。机器人只有数据处理能力,如何才能将外界的情况输入系统并且能够进行自我处理分析呢?这才是无人驾驶的关键性问题。那么这一切都需要一个传感器来连接内外系统。通过传感器获取到现实环境的数据,再运用计算机算法赋予它物理意义,从而让计算机也能“感知”到环境的具体状态。比如:通过摄像头拍摄,获取到路面车道线的情况数据。再使用计算机算法,找到拍摄到的影像中表示车道线的部分,赋予其物理意义,让计算机可以自动识别出车道线的位置。
目前无人驾驶汽车使用的传感器种类有很多,不同的传感器有不同的优势和劣势,可以分门别类地负责不同的情况。比如摄像头在物体识别方面较强,但是在距离感知上较差,也容易受天气、光线的影响;而激光扫描仪和毫米波雷达则可以更精确地判断距离的远近,却不能很好地识别物体。
同时不同的传感器规格不同,表现出来的特质也会不一样。例如:长距离毫米波雷达可探测200米外的物体,但是测量的角度却很小;而中距离雷达探测距离仅为60米,但角度范围却相对较大。
因此需要将不同的传感器结合使用,取长补短。目前已经运用到实际生活中的是福尔德,将摄像头和毫米波雷达相结合生产出了新式传感器,并开始进行量化生产了。
二、驾驶行为规划
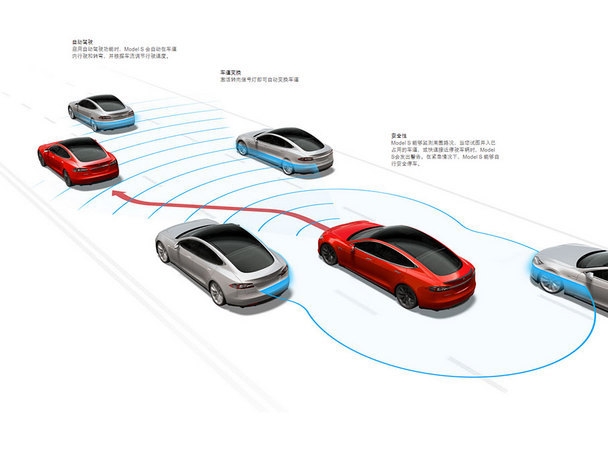
在无人驾驶领域,涉及到一个至关重要的问题,那就是驾驶行为规划。那么,什么是驾驶行为规划呢?行为规划是相对于路径规划而言的,路径规划指的是无人驾驶汽车从起始地点到目标地点的一个路径选择,且不考虑运动细节和具体轨迹,只是一个全局的规划。而行为规划则是一个具体的,详细的,包含了何时变道、如何变道等具体的驾驶行为决策。无人驾驶汽车只有完美地做到了行为规划,才能算得上真正的成功。
当然,目前也已经有所突破,比如特斯拉已经能够做到车道保持、自动变道、跟车功能等。但是问题是依旧需要人的指导,指导它何时切换、何时变道等,并不能完全脱离人的监督进行自动驾驶。
如果无人驾驶能够做到自我完成行为规划,还会产生巨大的功能。那就是可以解决现实生活中涉及到的疲劳驾驶、驾驶水平不足以及驾驶道德等问题,从而进一步增强汽车驾驶的安全性能,减少交通事故悲剧的产生。
三、自动定位
汽车驾驶无非就是三个问题:车在哪儿,去哪儿,怎么去。而针对第一个问题的解决目前有多种方法,比如卫星定位、地面基站定位、视觉或是激光定位以及惯导定位等等。当前使用较多的是前两种,即卫星定位和地面基站定位。
但是每种定位的方法都有其优势和劣势,比如卫星定位适用范围广,绝对位置精确度高,但是一有遮蔽物或是室内地下情况就无法获取,位置会随时间漂移。而视觉或是激光定位则相对位置精确度较高,无位置漂移,但是极易受到环境变化的影响。
因此最好的解决办法依旧是融合协作运用。当汽车在高速公路上行驶时使用前者,在进入地下通道时则可以使用后者,相互补充,完美切换。无人驾驶汽车的定位系统务必做的精确,所有的车辆控制和行为规划切换时都需要不断地反馈到精确的定位。根据不断变化的具体交通环境和位置来进行精确的运动算法,实现自动驾驶。
不可否认,无人驾驶是一项融合了多种高科技的产品。集环境感知、电子与计算机、自动控制、人工智能等多方面的黑科技为一体,这才是我们完美实现智能化驾驶的终极目标。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker 长按识别二维码关注
长按识别二维码关注硬科技产业媒体
关注技术驱动创新
 Google
Google