瑞士研究团队开发行走算法,让人形机器人能自如“优雅”地走路
接下来研究团队将持续改进算法,让其在各种环境下都可以应用自如。
对于人类而言,走路是一件很简单、很自然的事。但其实走路是一个十分复杂的动作,它需要多块肌肉之间恰好的平衡。所以,近年来机器人领域发展迅速,但是人形机器人的技术研究却困难重重。
为了解决机器人走路的“僵硬”问题,瑞士联邦理工学院(EPFL)Biorobotics实验室的工程师们开发了一种新的算法,该算法可以让机器人进行自我学习,从而帮助其不断改进走路的姿态,以达到最终自然的步态。
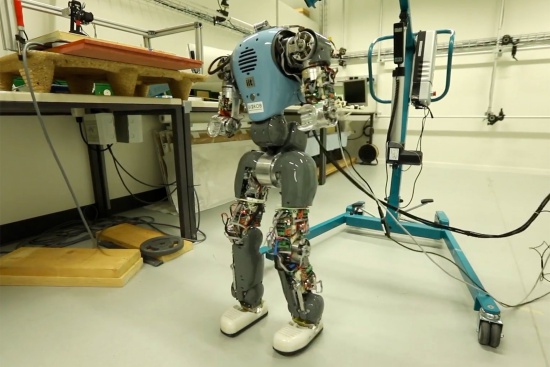
目前,实验室的工程师们正在一名叫做COMAN的机器人肢体上对该算法进行测试。值得注意的是,COMAN没有头,身高只有95cm,它专门用于研究走路姿态。
特点|平衡性
基于结构的对称性、机器人的动力学特性以及表征该机器人动力学的数学方程, EPFL团队为机器人设计了一段新的控制算法。
该控制算法调用复杂的计算机程序来仔细分析机器人反馈的各项参数(包括位置、速度、关节角度等),然后几乎同时,控制算法通过计算机向电机发送合适的命令,告诉机器人怎样做才能保持平衡。对此,Razavi解释道:“例如,如果有人推COMAN一下,我们的算法会迅速计算出机器人的脚应该往后挪多少的位置数据,让其做出类似于人直觉反应后的动作,以此来维持平衡。”
此处,COMAN维持平衡的结构值得一提,它的一大特点是其关节,该关节是由弹性元件组成,具有很大的灵活性。
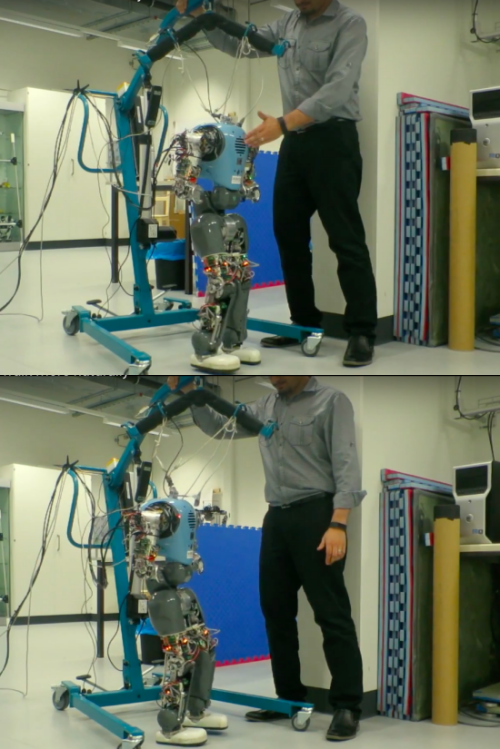
相较于已有的算法,该算法的突出特点是他不再让机器人通过对外在影响的对抗来刻意维持平衡,而是与外力达成一种动态协调的平衡性。
特点|克服障碍
基于这一平衡特性,研究团队针对三种应用场景设计了相应的算法,以帮助机器人在特定的环境场景中保持一定的灵活性和平衡性。
目前,算法的改进之处主要体现在三点:
第一个是可以在灾难性的情况下进行救援任务。对此,Razavi解释道:“在人类设计的环境中,就像在一座核电站,人形机器人可以爬楼梯和开门,他就会比有轮子的机器人更灵活的在这一环境中跑动。”
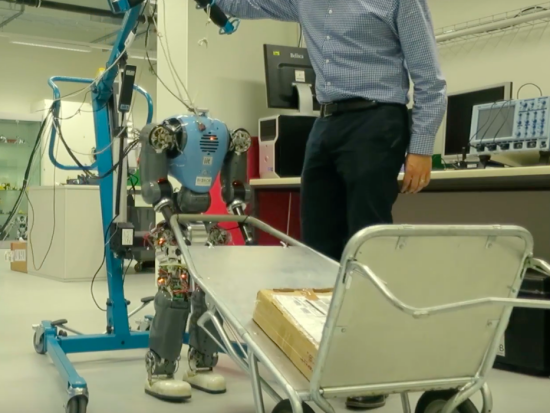
第二个是做一些类似于搬运重物或推拉物体的工作。第三个是为残疾人创造外骨骼。
但是Razavi表示:“能够维持简单的平衡还远远不够。”于是,接下来研究团队将持续改进算法,让其在各种环境下都可以应用自如,如可以克服障碍物或在不规则的地面上行走。
应用场景|与人合作
作为这个项目的一部分,Jessica Lanini和Hamed Razavi研究了两个人在抬东西的情况下如何能够协调实现正常的走路、转向和加速,当然,此处人不能说话交流是研究的前提。
近日,他们得出了结果,并将研究成果发表在了《PLOS ONE》上,结果表明两人自动协调他们的脚步以配合的过程,实质上就像一个四足的系统。现在,研究团队计划将该发现应用于人形机器人。
关于该研究的必要性,Lanini表示:“无论是在制造业还是在自然灾害的场景下,我们都需要能够与人类交互的机器人,帮助我们搬运重物,但目前这样的机器人不存在。因为为了安全有效的完成任务,机器人需要能够像人一样作出决策并对意外情况做出回应,但是还没有机器人可以做到这样。”
总结
目前,研究人员基于对人类行为的观察,分析了人类移动的方式,发现速度、力量和手部位置等因素在理解加速或停止的“命令”方面发挥了关键作用。接下来,他们将对这些观察成果进行建模,以便对机器人进行编程。
不过Razavi也表示: “究竟是什么让人类意识到需要减速或转弯、明确施加的力量大小以及让力与速度很好的结合。目前,我们对这些行为决策的关键点还不清楚。”
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker 长按识别二维码关注
长按识别二维码关注硬科技产业媒体
关注技术驱动创新
 机器人算法
机器人算法