我国研发的“水下机器人”,可以利用海水温度差自行供电
该机器人的研究中,能源转换技术是关键难题之一。
近日,中船重工集团宣布研制出国内首个深海型海洋温差自供能漂流浮标样机,在理论上实现了“水下永动机器人”,该款水下机器人未来将会被用于全球海洋观测计划(Argo计划)。
据悉,该浮标样机硬件上将会搭载CTD(温盐深)、溶解氧、pH、声学、光学等传感器,其研发过程需要攻克海洋温差发电、相变点控制、相变管储能等关键技术,从而保持其在海面上能够准确、智能得检测各类数据。
对此,中船重工710所高级工程师田振华指出:“海洋蕴含着巨大的能量,包括潮汐能、波浪能、温差能等,其中,温差能是利用水体垂向温度差异汲取能量,其在全球海洋能中储量最大,具有可再生、清洁、输出波动小等优点,尤其适合在大洋中做垂向运动的Argo浮标。但该能源转化技术超前、难度极高,因为其技术研发涉及材料、控制、机电、系统工程等众多学科领域。”

不过,与传统的智能浮标相比,该浮标样机利用海洋的温差变化作为能源的供给来源,具备成本低、寿命长等优点。目前,装有雷达应答器、无线电指向标、雾警信号和海洋调查仪器等传统设备的海上浮标大多是用锂电池供电的,成本高,工作寿命仅3至5年,失效后还会对海洋造成污染,存在诸多弊端。
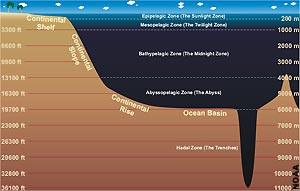
值得指出的是,Argo计划是我国针对海面大数据收集所推出的一项计划。它主要就是快速、准确、大范围得收集海洋上层(海平面到2000米深处)的海水剖面资料,未来我国将在海平面上以3个纬度为间距布设浮标节点,以形成一张浮标网,从而有效的测量海水温度、盐度、压力等数据。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker 长按识别二维码关注
长按识别二维码关注硬科技产业媒体
关注技术驱动创新
 机器人
机器人