快看!这个机器人穿着人类的鞋子在走路
人类穿鞋子是为了保护脚,为什么这个机器人也要穿鞋子?
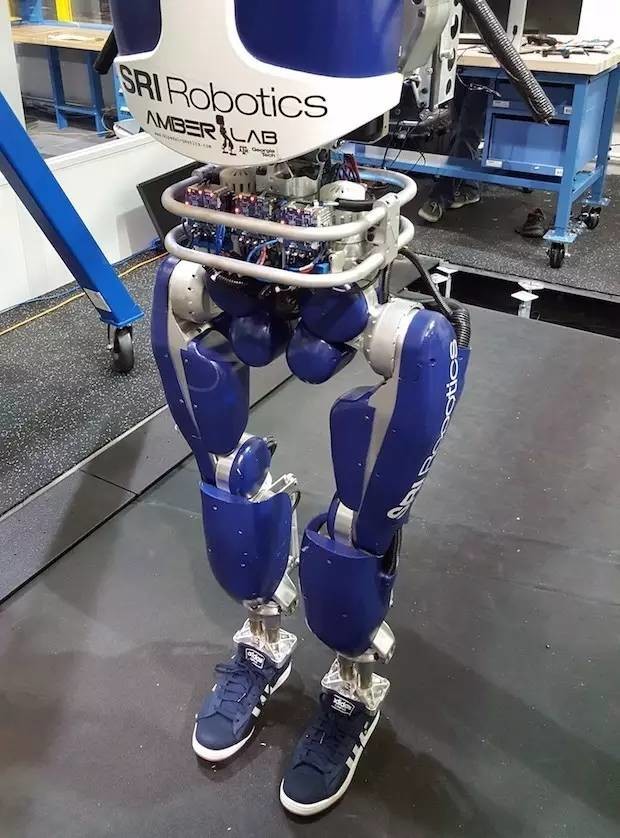
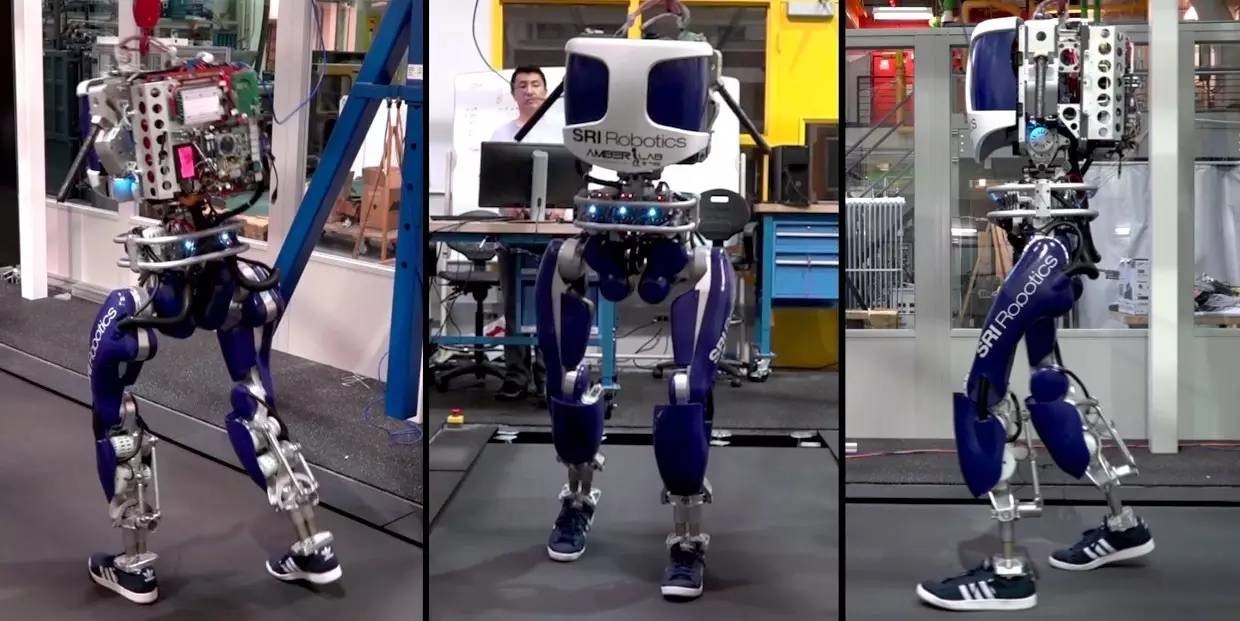
近日,美国乔治亚理工学院的研究员向人们公布了他们的机器人成果。在不到一分钟的视频中,我们可以看见一个机器人正四平八稳地在履带上行走,而奇特的是,这个机器人的脚上竟然穿着一双人类的运动鞋,并且步态也与人类的走路姿态极其相似。
该机器人叫做DURUS,而这已经不是它第一次亮相了。早在去年的DARPA(美国国防部先进研究项目局)机器人挑战赛(DRC)决赛上,DURUS仅靠一块电池缓慢而平稳地走了两公里,虽然耗时超过两个半小时,但通过硬件软件,特别是步态控制(gait control)的创新结合,DURUS行走效率明显高于其调机器人。而这对于机器人移动方面是非常具有意义的。
当时在DRC 决赛上,当问及DURUS接下来将要添加怎样的新能力时,先进机械二足试验机器人实验室(AMBER)负责人Aaron Ames表示,下一步打算让DURUS拥有更自然的足部行为,包括像人类一样的脚后跟和脚尖的连接方式。而现在,他们几乎已经成功了。
目前,绝大部分类人机器人,即使像ATLAS、ASIMO、HUBO 和 HRP 这种高端型的,走路依靠的都是又大又平的脚掌,通过与地面的大面积接触提供最大化的稳定性,并且为了让重心尽可能地位于它们巨大的脚掌之上,以防翻倒,因而在站立上也采用了非常机器人化的半蹲姿势。开创性的是,DURUS的脚部设计的和人类脚部形状相同,足部拱起还有脚跟,因此能更加自然地行走。
对于这个亮点的设计,Ames 说:“人类走路最关键的特点就是每走一步足部的转动方式;即脚尖先推进,然后脚后跟着地。”将这样的足部转动方式运用到机器人的移动上,哪怕是坑坑洼洼的道路条件下,相信DURUS也是可以正常移动,并且也有助于重心的保持。
此外,DURUS在设计上还有一个亮点,就是将开发建立在一个广义的数学框架上,摆脱任何约束条件和假设。在此基础上,研发人员就可以简单的把自己的要求加到这个框架上,比如说加入人类的走路步态,然后机器人就可以把它实现,从而拥有了更灵活、看起来也更自然的步态,也就大大提高了机器人的速度和效率。
针对这个数学框架,Ames 解释说:“在很多方面,这些结果都是我们在 DRC 公布的技术的自然延伸。数学框架还是一样的,但是我们给他扩展出了更先进的行为。而且我们也有了对如何稳定这种更灵活和复杂步态的更多理解(数学上和实践上的都有);比如,现在的走路速度是在 DRC 上展示时的两倍,这要求所有方面都达到更高的水平。但说到底,我们用的是同样的数学框架,这个事实说明了这种方法的可扩展性。”
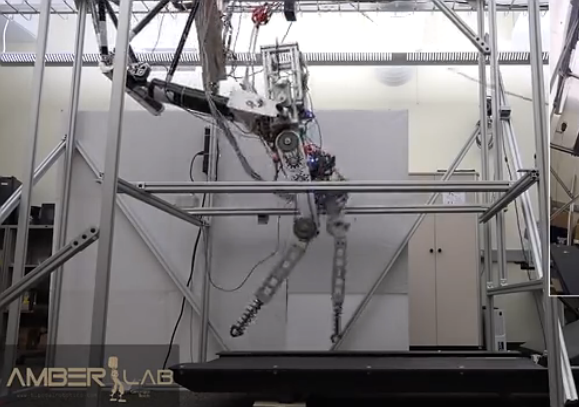
DURUS在有束缚状态下奔跑
虽然DURUS在移动上已经走出了很大的一步,但对于AMBER实验室来说,这还只是开始。目前,AMBER实验室得到了美国国家科学基金会(National Science Foundation)的国家机器人基金的赞助,而在接下来的日子里,研发人员计划让DURUS学习更先进的行为,比如无束缚的情况下进行奔跑之类的。
在此之前,为了这项计划的实施,他们必须先应付未知的起伏不平的地形、阶梯、以及其它复杂的状况,而这其中的关键就在于实验室当前正在开发的统一的控制和设计框架。
如果这项计划成功的话,那将不仅仅是类人机器人发展史上的一个里程碑,还将在医疗行业引起轩然大波。在统一的控制和设计框架的基础上,硬件不同的机器人都可以加以控制。只要将用在DURUS身上的技术移植到假肢及外骨骼上,就可以让人类拥有高效且自然的运动能力。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker 长按识别二维码关注
长按识别二维码关注硬科技产业媒体
关注技术驱动创新
 机器人
机器人